La definición de la interfaz A2B es propietaria. Por ejemplo, para acceder a los datos de audio para el control de calidad de la matriz del micrófono, se necesita un dispositivo que convierta los datos de red A2B en un formato analógico o digital AES/EBU. Las señales de los canales de audio convertidos (p.ej. de micrófonos MEMS digitales) pueden ser alimentadas al analizador de audio. Para ello, existen varios dispositivos de interfaz A2B disponibles en el mercado, como el A2B Analyzer de Mentor. Esto es programable y se puede integrar completamente en el sistema de prueba de micrófonos NTi Audio.

Una vez que las señales de micrófono están disponibles en el analizador de audio, éste realiza los procedimientos de medición para los arreglos de micrófonos digitales MEMS.
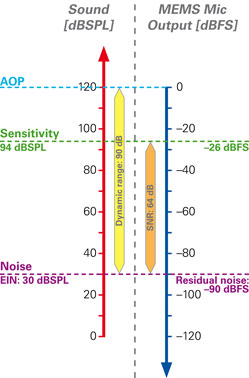
Los parámetros típicos para una prueba de calidad son los mismos que para la mayoría de los demás micrófonos: sensibilidad, respuesta de frecuencia, distorsión y relación señal/ruido (SNR). Para una caracterización completa de un micrófono en un entorno de laboratorio, se miden o calculan parámetros adicionales como el Ruido de Entrada Equivalente (EIN) y el rango dinámico.
En todas las mediciones absolutas (es decir, las que no se expresan en % o dB), las unidades de los micrófonos digitales MEMS difieren de las de los micrófonos analógicos. Mientras que para este último la sensibilidad se expresa en mV/Pa o dBV/Pa, para los micrófonos digitales la unidad es dBFs. Esto significa "escala completa de decibelios"(decibel full scale) y describe la diferencia entre la ganancia de un micrófono digital a 94 dBSPL (1 Pa) y la ganancia digital máxima de ese micrófono. Este punto de máxima ganancia digital también se denomina AOP (Acoustic Overload Point).
Visualización acústica vs. digital
Para la caracterización de un módulo de micrófono A2B, es de interés cómo los valores de los micrófonos MEMS ensamblados se comportan entre sí. Un parámetro típico es el " Rango de sensibilidad ", es decir, la diferencia entre la sensibilidad más alta y la más baja de todos los micrófonos MEMS en el circuito impreso.
Características especiales de los micrófonos digitales MEMS
Los micrófonos digitales MEMS proporcionan datos en formato PDM de ciclo ½ El micrófono requiere una entrada de señal de reloj (CLK) y envía los datos a través de su salida DATA. Dos micrófonos comparten una línea de datos. Por lo tanto, cada micrófono está configurado como un micrófono "izquierdo" o "derecho". Esto se hace cableando la entrada L/R a Vdd o a tierra. La tensión de alimentación de los micrófonos MEMS suele ser de 1,8 V o 3,3 V. Los micrófonos MEMS se conectan a la entrada L/R mediante un cable.
En funcionamiento normal, el micrófono izquierdo escribe un bit de datos en cada flanco ascendente de la señal de reloj, mientras que el micrófono derecho escribe su bit de datos en cada flanco descendente. Mientras que un micrófono escribe datos, el otro pone su pin de salida DATA en un estado de „High-Impedance“ (Alta impedancia). El DSP que recibe los datos separa los datos de la señal izquierda y derecha y los forma en dos señales de audio.
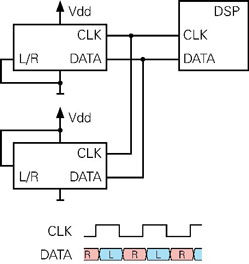
Funcionamiento normal de dos micrófonos digitales MEMS
Pero, ¿qué sucede si uno de los dos micrófonos es defectuoso o si falta por completo?
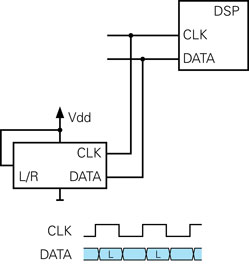
Funcionamiento con un micrófono MEMS no funcional o no equipado
En este ejemplo, falta el micrófono derecho, por lo que sólo el izquierdo escribe en la línea de datos común. En los bordes descendentes, el micrófono izquierdo pone su línea DATA en un estado de alta impedancia. Por lo tanto, la línea DATA mantiene el mismo estado que fue escrita previamente por el micrófono izquierdo. Desde la perspectiva del DSP de recepción, el micrófono derecho parece ofrecer los mismos datos que el izquierdo, es decir, los dos flujos de datos son idénticos. El sistema de prueba debe detectar esta condición, que es una falla fundamental del módulo de micrófono A2B bajo prueba.