Qualitätskontrolle von digitalen MEMS-Mikrofonen
Ein digitales MEMS-Mikrofon (MicroElectroMechanical System), auch bekannt als Mikrofonchip oder Siliziummikrofon, ist eine druckempfindliche Membran auf einer Leiterplatte (Printed Circuit Board), die manchmal nicht größer als ein Streichholzkopf ist. Sie werden in verschiedenen Konsumgeräten sowie in Automobil- und Industrieanwendungen eingesetzt. Ein digitales MEMS-Mikrofon kombiniert einen akustischen Sensor sowie einen A/D-Wandler auf einem Siliziumchip und ist in der Regel direkt mit einem Signalprozessor verbunden. Aufgrund der schnell wachsenden Nutzung von Spracherkennungsanwendungen werden digitale MEMS-Mikrofone häufig in einer Array-Formation eingesetzt. Bei der Qualitätsprüfung der Mikrofone müssen die absoluten Spezifikationswerte und, noch wichtiger, die Werte aller Mikrofone im Array relativ zueinander geprüft werden. In diesem Artikel wird erläutert, wie digitale MEMS-Mikrofone an ein akustisches Testsystem angeschlossen werden und wie die relevanten Schlüsselparameter für ein zuverlässiges QC-Verfahren (Quality Control) gemessen werden.
Um die akustischen Parameter eines digitalen MEMS-Mikrofons zu testen, muss das digitale Signal direkt mit dem Audioanalysatorsystem verbunden oder in ein anderes Format, z. B. analog, konvertiert werden. Die typischen Parameter von Interesse für einen QC-Test sind die gleichen wie für die Prüfung der meisten anderen Mikrofone: Empfindlichkeit, Frequenzgang, Klirrfaktor und manchmal Signal-Rausch-Verhältnis (SNR). Für eine vollständige Mikrofoncharakterisierung, die typischerweise in einer Laborumgebung durchgeführt wird, werden Parameter wie EIN (Equivalent Input Noise), PSR (Power Supply Rejection), PSRR (Power Supply Rejection Rate) und Dynamic Range gemessen oder berechnet. Optional kann das Richtungsverhalten eines Mikrofons bei verschiedenen Frequenzen mit einem Drehteller gemessen werden.
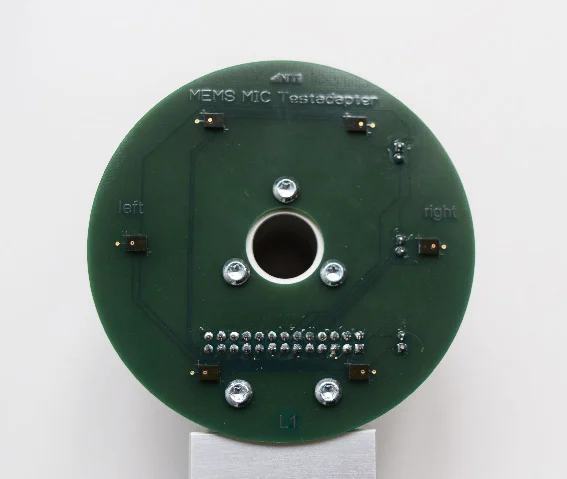
Array von 6 digitalen MEMS-Mikrofonen
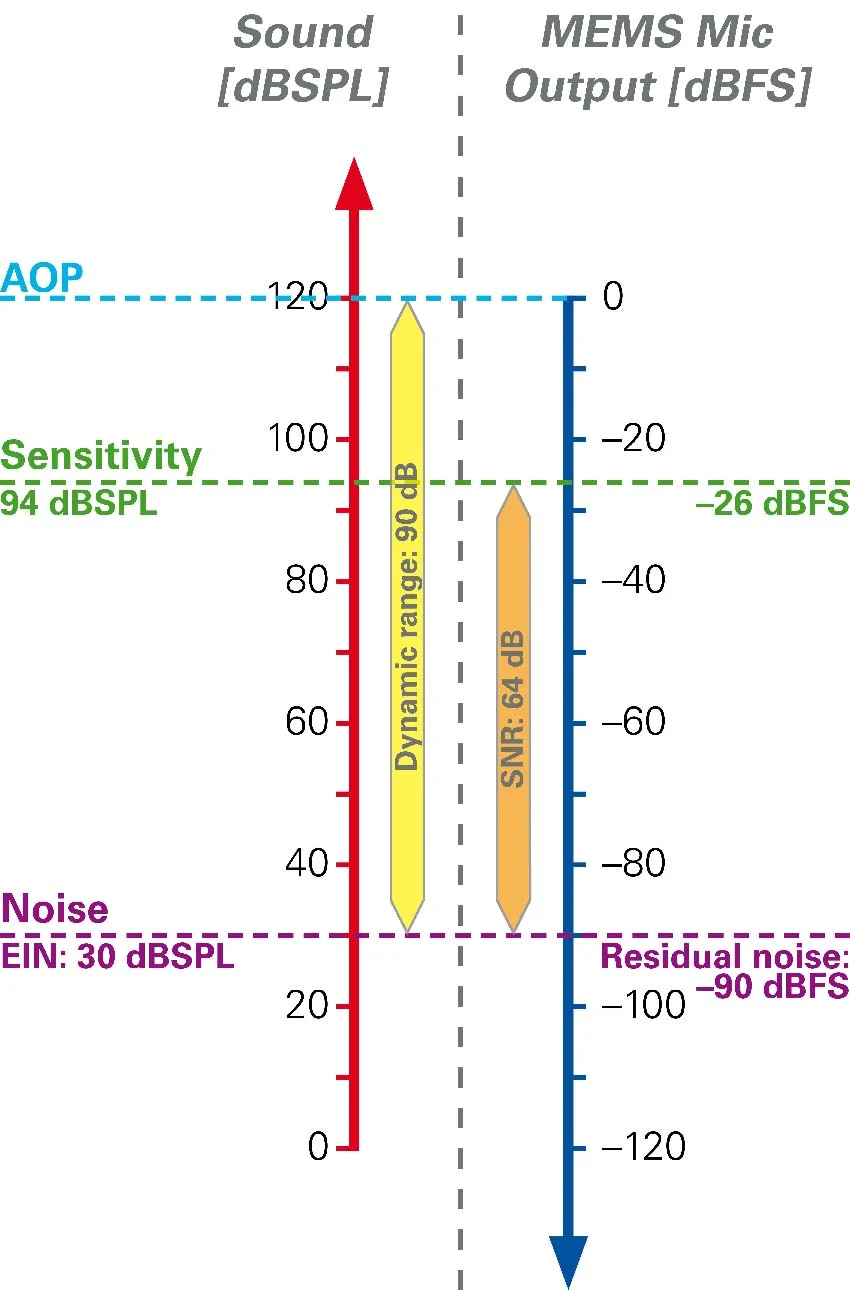
Für alle absoluten Messungen (die nicht in % oder dB ausgedrückt werden) sind die Einheiten für digitale MEMS-Mikrofone unterschiedlich. Während die Empfindlichkeit von analogen Mikrofonen in mV/Pa oder dBV/Pa ausgedrückt wird, ist die Einheit für digitale Mikrofone dBFs. Dies steht für „Dezibel unterhalb der Vollausschlagsskala“ und beschreibt den Headroom eines digitalen Mikrofons von 94 dBSPL (1 Pa) bis zum maximalen digitalen Ausgang dieses Mikrofons. Dieser Punkt des maximalen digitalen Ausgangs wird auch als AOP (Acoustic Overload Point) bezeichnet.
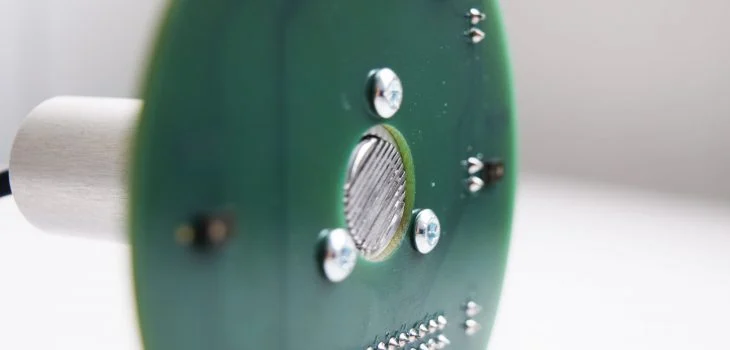
Das Testen einzelner MEMS-Mikrofone ist sehr selten. In den meisten Fällen werden die MEMS-Mikrofone auf einer bestückten Leiterplatte getestet, die mehrere MEMS-Mikrofone enthält. Für die Charakterisierung der Leistung dieser Leiterplatte ist es von Interesse, wie sich die bestückten MEMS-Mikrofone relativ zueinander verhalten. Ein typischer Parameter ist die „Sensitivity Span“; die Differenz zwischen der höchsten und niedrigsten Empfindlichkeit, die an den bestückten MEMS-Mikrofonen gemessen wird.
Akustische vs. digitale vs. analoge Domäne
Besonderheiten digitaler MEMS-Mikrofone
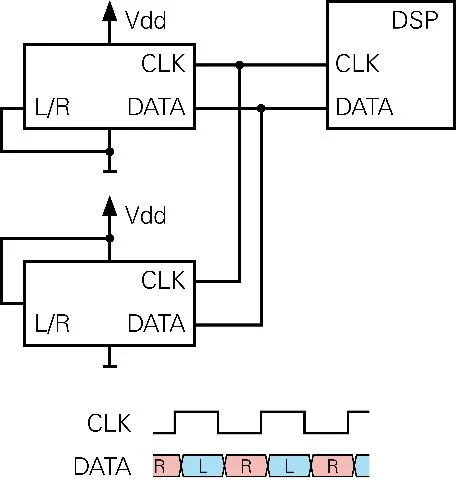
Digitale MEMS-Mikrofone liefern Daten im ½-Zyklus-PDM-Format. Das Mikrofon benötigt einen CLK-Eingang und liefert seine Daten an einem DATA-Ausgang. Darüber hinaus teilen sich zwei Mikrofone eine Datenleitung. Daher ist jedes Mikrofon so konfiguriert, dass es entweder ein „linkes“ oder ein „rechtes“ Mikrofon ist. Dies geschieht durch Festverdrahtung des L/R-Eingangs entweder mit Vdd oder mit Masse. MEMS-Mikrofone werden meist mit 1,8 V oder 3,3 V versorgt.
Im Normalbetrieb schreibt das „linke“ Mikrofon bei jeder steigenden Flanke des Taktsignals ein Datenbit, während das „rechte“ Mikrofon bei jeder fallenden Flanke ein Datenbit schreibt. Während ein Mikrofon Daten schreibt, versetzt das andere seinen DATA-Ausgang in einen hochohmigen Modus. Auf dem DSP, der die Daten empfängt, werden die linken und rechten Signaldaten dann getrennt und zu zwei Signalströmen zusammengeführt.
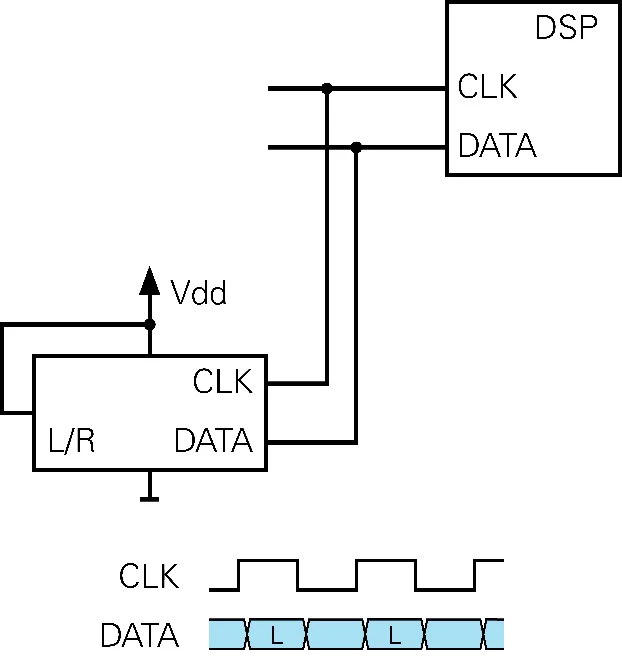
Was passiert aber, wenn eines der beiden Mikrofone nicht korrekt zusammengebaut ist oder fehlt?
In diesem Beispiel fehlt das rechte Mikrofon, daher schreibt nur das linke Mikrofon auf die Datenleitung. An den fallenden Flanken versetzt das linke Mikrofon seine DATA-Leitung in einen hochohmigen Zustand. Daher behält die DATA-Leitung ihren Zustand bei, wie er zuvor vom linken Mikrofon geschrieben wurde. Infolgedessen scheint aus der Sicht des empfangenden DSP das rechte Mikrofon genau die gleichen Daten wie das linke Mikrofon zu liefern. Die beiden Datenströme sind identisch! Dieses Problem muss vom Testsystem behoben werden, da die Erkennung eines fehlenden Mikrofons eine grundlegende Funktion beim Testen einer MEMS-Array-Leiterplatte ist.
Die Taktfrequenzen, die zum Betreiben digitaler MEMS-Mikrofone verwendet werden, liegen typischerweise zwischen einigen hundert kHz und bis zu 3 MHz. Eine niedrigere Taktrate bedeutet einen geringeren Stromverbrauch, aber auch eine geringere Audioqualität.
Um die Integrität des digitalen Signals zu gewährleisten, wird empfohlen, die Abstände zwischen digitalen MEMS-Mikrofonen und dem Audio-Testsystem so kurz wie möglich zu halten. Diese Mikrofone sind einfach nicht dafür ausgelegt, ein langes, hochkapazitives Kabel zu treiben.
Normalbetrieb von zwei digitalen MEMS-Mikrofonen
Betrieb mit einem inoperativen oder fehlenden MEMS-Mikrofon
Eine typische Testsystemarchitektur
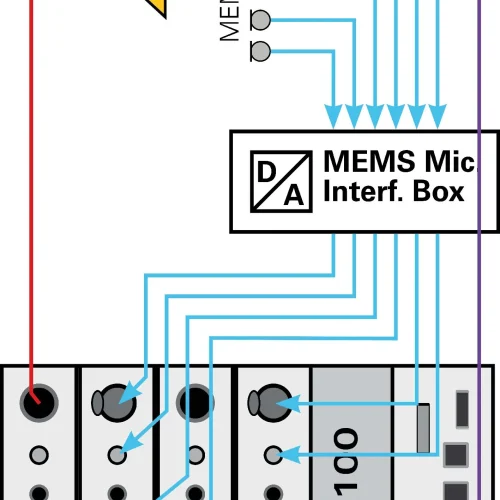
Testaufbau zur Messung einer 6 MEMS-Mikrofon-Array-Leiterplatte
Das grundlegende Messsystem zum Testen digitaler MEMS-Mikrofon-Arrays besteht aus einem Audioanalysator, einem MEMS-Schnittstellengerät, einem Referenzlautsprecher und einem Referenzmikrofon. Eine PC-Software steuert typischerweise ein solches System.
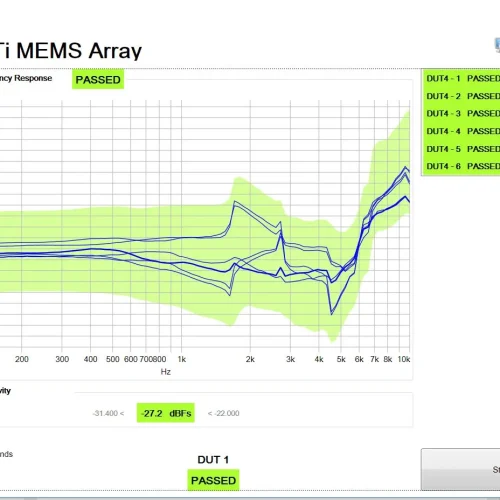
EOL MEMS Mic Array QC Software