Geräuschwarnsysteme für Elektroautos
Seit dem 1. Juli 2019 müssen neue Elektro- und Hybridautos in Europa ein akustisches Warnsignal erzeugen, wenn sie unterhalb einer bestimmten Geschwindigkeit betrieben werden. Diese Maßnahme soll Fußgänger im Allgemeinen und Sehbehinderte im Besonderen auf Elektro-/Hybridautos aufmerksam machen, die sich mit niedriger Geschwindigkeit nähern oder sich im Leerlauf befinden. Bei höheren Geschwindigkeiten überwiegen Windgeräusche und Reifenabrollgeräusche.
Viele andere Länder und Regionen haben bereits ähnliche Gesetze oder planen diese.

Definitionen
In der Europäischen Union ist die offizielle Bezeichnung „Acoustic Vehicle Alerting System“ oder kurz AVAS. AVAS-Systeme sind allgemein in dieser EU-Verordnung und spezifischer in dieser UNECE-Verordnung spezifiziert.
Hier sind einige wichtige Punkte aus akustischer Sicht:
- Das Geräusch muss unterhalb von ca. 20 km/h sowie im Leerlauf und beim Rückwärtsfahren abgegeben werden
- Das Geräusch muss das Verhalten des Fahrzeugs anzeigen, insbesondere jegliche Änderungen der Geschwindigkeit des Fahrzeugs
- Der Geräuschpegel darf den Pegel eines Autos mit Verbrennungsmotor unter den gleichen Bedingungen nicht überschreiten
- Der abgegebene Geräuschpegel muss über Mindestwerten liegen, die für Geschwindigkeiten von 10 km/h und 20 km/h als Breitbandpegel und Terzbandpegel definiert sind
- Der abgegebene Geräuschpegel muss unter einem absoluten Maximalwert liegen
Diskrepanzen und Bedenken
- Abschaltfunktion.
Eine Sicherheitsfunktion abschalten zu können, erscheint als eine seltsame Idee. - Lärmparadox.
Einer der Hauptvorteile der Elektromobilität im Allgemeinen ist die reduzierte Lärmemission. Die Einführung einer künstlichen Lärmemission macht diesen Vorteil zunichte. - Die Möglichkeit, verschiedene Geräusche auszuwählen
Erinnern Sie sich an die Zeit, als Mobiltelefone weit verbreitet wurden? Jeder öffentliche Raum wurde mit einer Suppe von Klingeltönen überflutet. Hoffen wir, dass sich dies nicht wiederholt, wenn immer mehr Elektroautos unsere Straßen bevölkern.
Wie werden die Autos klingen?
Es gibt eine Vielzahl von Warntönen, die von den verschiedenen Autoherstellern implementiert werden. Um eine Vorstellung von den verschiedenen Aspekten und Anforderungen zu bekommen, sehen Sie sich diesen bemerkenswerten TED-Talk „Wie sollten sich Elektroautos anhören?“ an, der von Renzo Vitale auf der TED@Merck KGaA Darmstadt / Germany im November 2018 präsentiert wurde.
Technische Realisierung
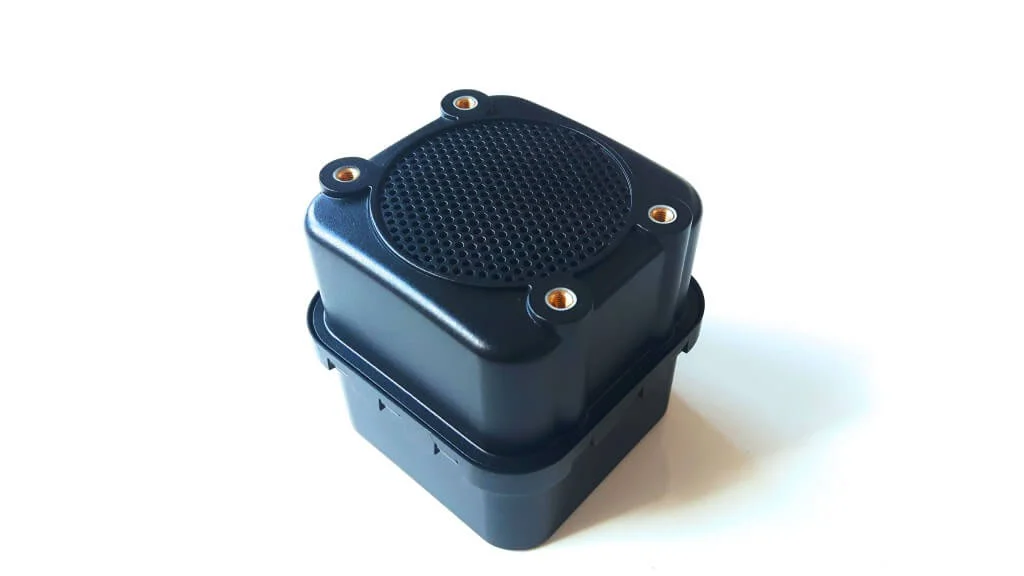
Die meisten Fahrzeuge sind mit zwei AVAS-Lautsprechereinheiten ausgestattet. Eine vorne für die Vorwärtsfahrt und eine hinten für die Rückwärtsfahrt. Diese Lautsprechereinheiten sind im Motorraum und unter dem Heck eines Fahrzeugs platziert. Sie sind Kälte, Hitze und Spritzwasser ausgesetzt und müssen daher in einem abgedichteten Gehäuse untergebracht werden, um den Lautsprechertreiber und die Elektronik zu schützen.
AVAS-Soundgenerator von ARKAMYS, Quelle
Diese Geräte sind mit dem Fahrzeugbusnetzwerk verbunden, um Echtzeitinformationen über die Geschwindigkeit zu erhalten. Das Gerät kann eine Auswahl von Geräuschen abspielen und diese Geräusche verändern, um die tatsächliche Geschwindigkeit des Fahrzeugs anzuzeigen.
Wie testet man ein solches Gerät in der Fertigung?
Aus Sicht des Testkonzepts kann eine AVAS-Lautsprechereinheit als ein aktiver Lautsprecher betrachtet werden, der von einem Soundfile-Player angesteuert wird. Das bedeutet, dass der Lautsprecher nicht direkt von einem Audioanalysatorsystem angesteuert werden kann. Das Testen eines solchen Geräts erfordert einen „Open Loop“-Messprozess.
In einer Open-Loop-Konfiguration wird das Testsignal von der AVAS-Lautsprechereinheit selbst abgespielt. Es besteht aus einem GlideSweep-Signal, dem ein Triggerabschnitt vorangestellt ist, der es dem Audioanalysator ermöglicht, sich mit dem Start des Signals zu synchronisieren. Hier ist ein typisches Beispiel für ein solches Testsignal.
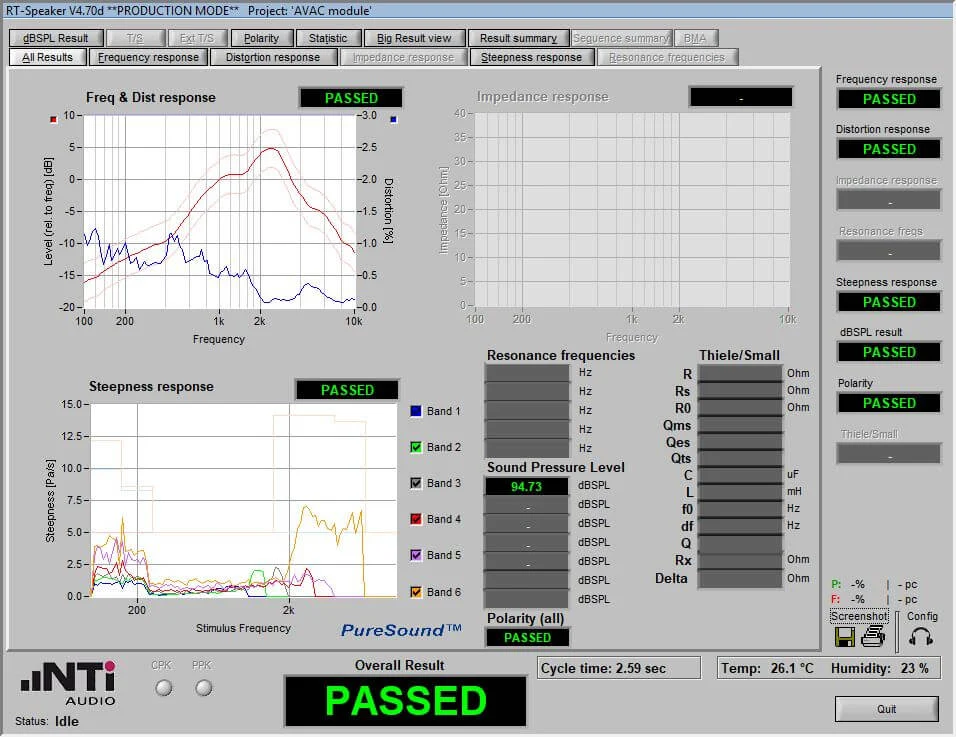
Typische Ergebnisse, die aus einem solchen GlideSweep extrahiert werden können, sind
- Lautsprecherempfindlichkeit (bei einer oder mehreren Frequenzen)
- Frequenzgang
- Klirrfaktorverhalten
- Steilheitsverhalten. (weist auf elektromechanische Fehler des Lautsprechers oder lose montierte Komponenten hin)
Jedes Messergebnis wird mit den PASS/FAIL-Kriterien aus der Gerätespezifikation verglichen. Dies ermöglicht eine gründliche Beurteilung der Qualität des getesteten Geräts.
0:00 /0:00