Electric car warning sound systems
Effective from July 1st 2019, new electric and hybrid cars in Europe are required to produce an acoustic warning sound when operated below a certain speed. This measure is to make pedestrians in general, and visually-impaired in particular, aware of electric/hybrid cars approaching at low speed, or at idling state. At higher speeds, wind noise and tire rolling noise prevail.
Many other countries and regions already have, or plan to have, similar legislation.

Definitions
In the European Union, the official denomination is “Acoustic Vehicle Alerting System” or AVAS for short. AVAS systems are specified generally in this EU regulation , and more specifically in this UNECE regulation.
Here are a few key points from an acoustics point of view:
- Sound must be emitted below approx. 20 km/h as well as in idle and reverse operation
- The sound must indicate the behavior of the vehicle, in particular any changes of the speed of the vehicle
- The sound shall not exceed the level of a car with combustion engine under the same conditions
- The emitted sound level must be above minimum values, defined for 10 km/h and 20 km/h speeds as broadband level and third octave band levels
- The emitted sound level must be below an absolute maximum value
Discrepancies and concerns
- Turn off feature.
Allowing a safety feature to be turned off seems like an odd idea. - Noise paradox.
One of the major advantages of electric mobility in general is the reduced noise emission. Introducing an artificial noise emission negates this benefit. - Being able to select different sounds
Remember the days when cell phones became widely popular? Every public space was flooded with a soup of ringtones. Let’s hope that this does not repeat as more and more electric cars populate our streets.
What will the cars sound like?
There are a multitude of warning sounds being implemented by the various car manufacturers. To get an idea of the different aspects and requirements, see this remarkable TED Talk “What should electric cars sound like?”, presented by Renzo Vitale at TED@Merck KGaA Darmstadt / Germany in November 2018.
Technical realization
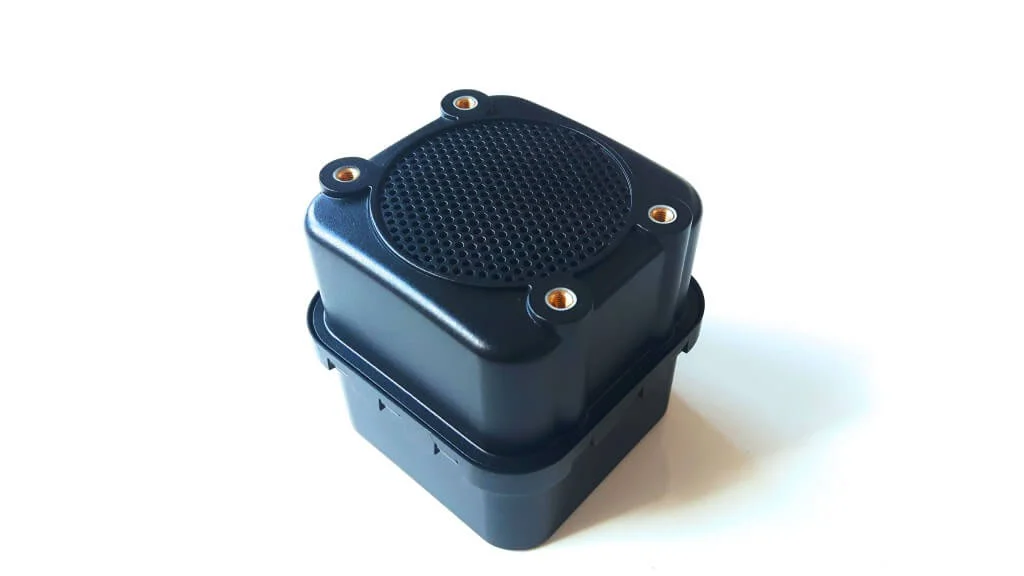
Most vehicles are equipped with two AVAS loudspeaker units. One in the front for forward drive, and one in the rear for reverse drive. These loudspeaker units are placed in the motor compartment and under the rear section of a vehicle. They are exposed to cold, heat and splash water and therefore must be encased in a sealed enclosure to protect the loudspeaker driver and the electronics.
AVAS sound generator from ARKAMYS, Source
These devices are connected to the vehicle bus network in order to get real time information on the speed. The device can play a choice of sounds and modify those sounds in order to indicate the actual speed of the vehicle.
How to test such a device in manufacturing?
From a test concept perspective, an AVAS loudspeaker unit can be seen as an active loudspeaker driven by a sound file player. That means that the loudspeaker cannot be driven directly by an audio analyzer system. Testing such a device requires an “Open Loop” measurement process.
In an Open Loop configuration, the test signal is played from the AVAS loudspeaker unit itself. It consists of a GlideSweep signal, headed by a trigger section that allows the audio analyzer to synchronize to the start of the signal. Here’s a typical example of such a test signal.
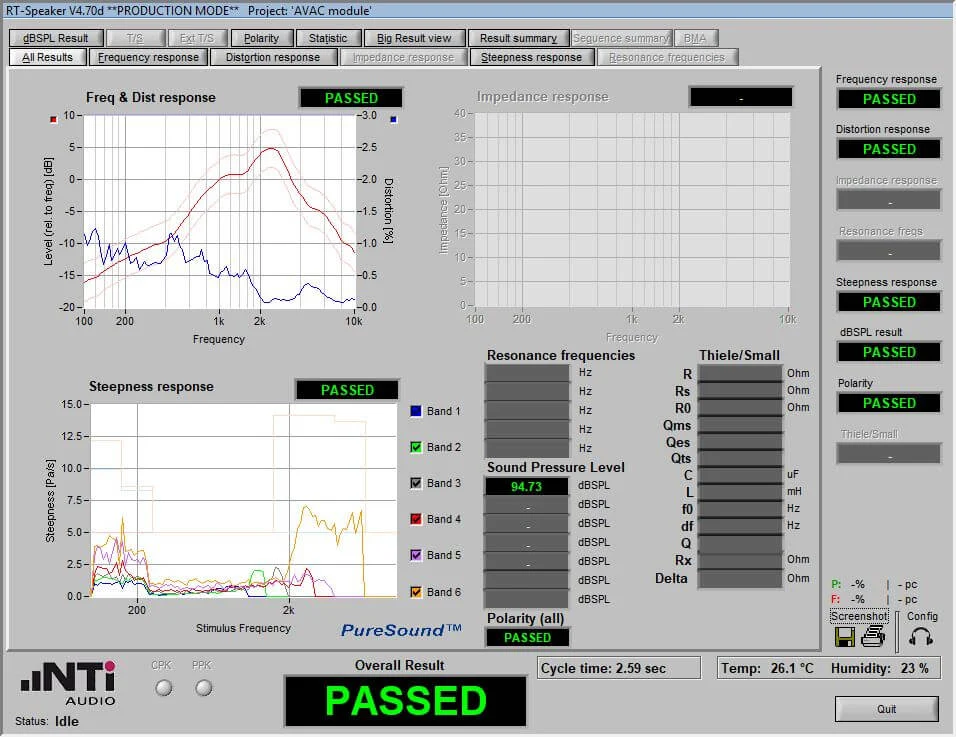
Typical results that can be extracted from such a GlideSweep are
- Loudspeaker sensitivity (at one or several frequencies)
- Frequency response
- Distortion response
- Steepness response. (indicates electromechanical failures of the loudspeaker or loosely-mounted components)
Each measurement result is compared against PASS/FAIL criteria from the device specification. This provides a thorough assessment on the quality of the tested device.
0:00 /0:00